Linear type actuators have been widely used in machine tools, robotic, industrial equipment, automobile, aircraft and other transportation devices. There are different kinds of linear actuators utilizing either hydraulic, pneumatic, rotary type motor with conversion mechanism or linear motor. Hydraulic and pneumatic actuators are poor actuators in terms of controllability and maintainability. Moreover, recently, from the maintenance viewpoint, the direction is to replace hydraulic and pneumatic actuators by electric type motor. Nevertheless, gearless electric motor has poor thrust per unit volume characteristic. However, using a combination of rotary type motors with linear motion conversion mechanisms as a linear actuator result in larger equipment and the system becomes nonbackdrivable. The nonbackdrivability causes lack of adaptability and safety. Linear motors provide direct-drive motion and eliminate mechanical transmission devices; however, due to low thrust per unit volume characteristic, the size of the system becomes relatively big for high-thrust application.
To overcome the difficulties associated with the conventional direct-drive system, including linear motor, a novel high-thrust linear actuator with spiral structure is proposed.
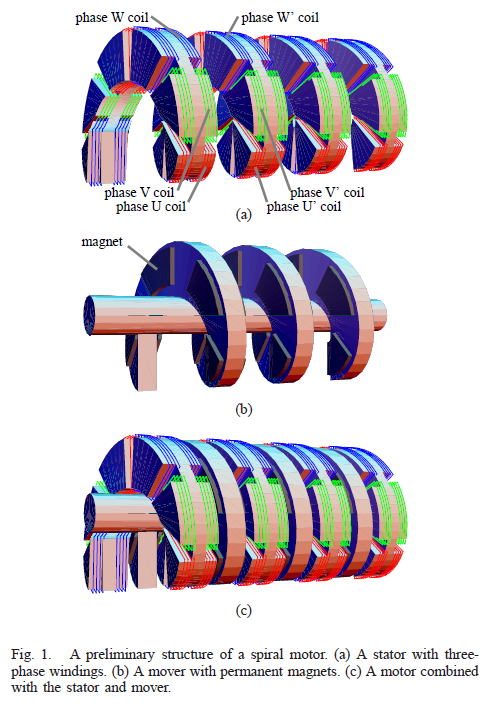
Spiral motor, a novel high-thrust linear actuator with high backdrivability, consists of a spiral (helical) structure stator and mover. The mover moves helically in the stator and the linear motion is extracted to drive the load. Thus, The motor realizes direct-drive motion without mechanical gears. Moreover, the motor has high thrust-force characteristics because the flux is effectively utilized in its 3-D structure.
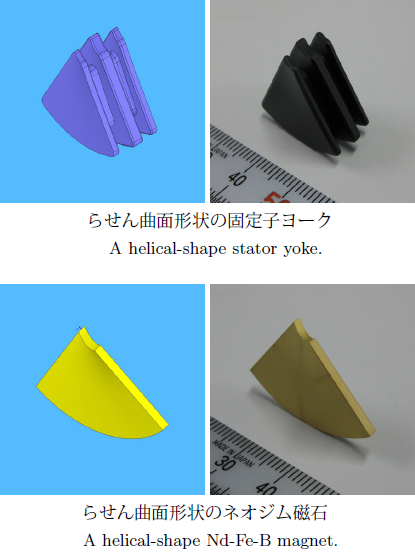
Fig. 1 shows a preliminary structure of the spiral motor. Permanent-magnets(PMs) are attached on the surface of the mover (Fig.1b). Slots are also provided for winding on the surface of the stator (Fig.1a). A rotation cancellation mechanism for the output axis is used when only translation motion is needed.
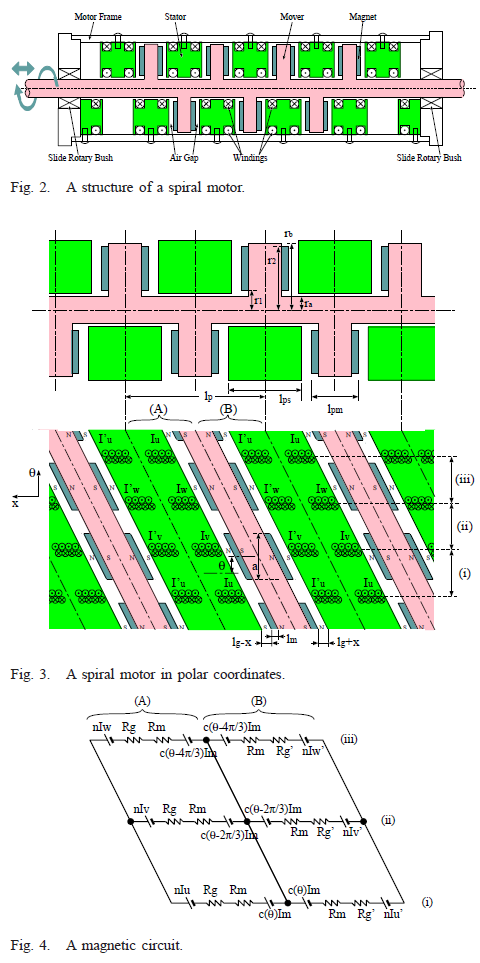
The structure of the spiral motor is shown in Fig.2. Spiral motor is an axial-gap helical-motion PM motor. Due to its large air-gap area, the motor can generate a relatively high thrust force. Two slide rotary bushes support the radial load of the mover, and the electromagnetic force directly controls the thrust load. Under a proper gap control against the load fluctuation, a full direct-drive motion is achieved. The concept is similar to magnetic levitation control.
Fig. 3 shows the polar coordinates expression of the motor. From this model, a simple magnetic circuit, as shown in Fig. 4, is obtained.
Development of the first prototype
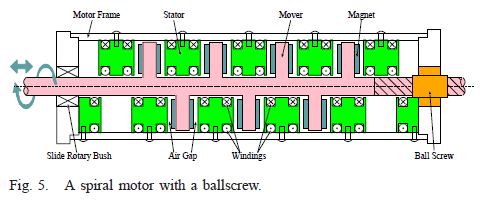
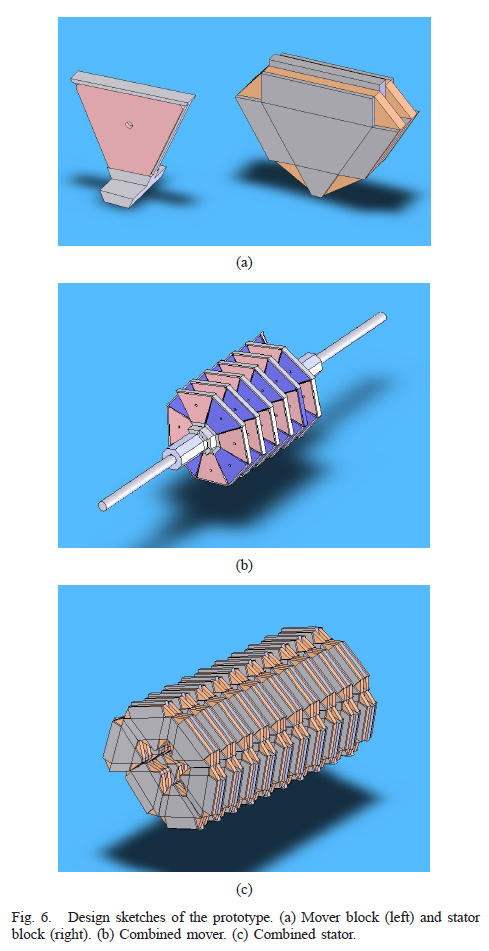
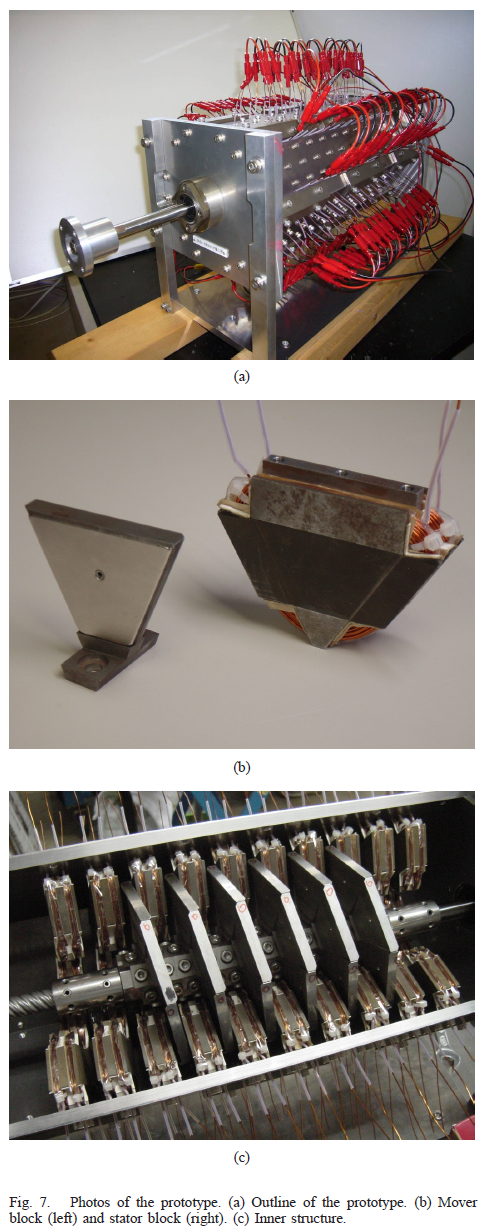
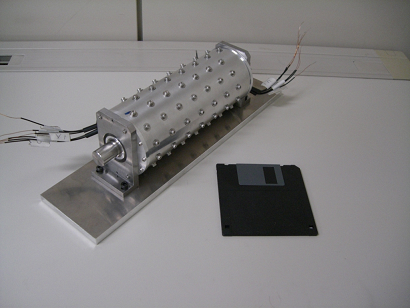
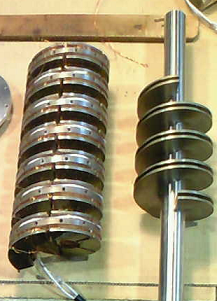
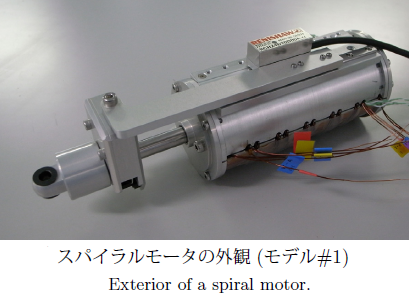
The gap control is not necessary if we introduce a ballscrew at the axis of the mover, as shown in Fig. 5. The structure of the proposed spiral motor is very complicated. Thus, we have designed for the first prototype unit components of the mover and the stator. The mover and stator units are shown in Fig. 6(a). The mover unit has two magnets on it surfaces. The stator unit equips two windings. The surfaces of these units are almost flat, and the units are possible to manufacture easily. The spiral structures are approximately realized by combining these units. The photos of the developed components are shown in Fig. 7. Fig. 7(a) shows the outline of the prototype. The mover and the stator units are shown in Fig. 7 (b). Fig. 7 (c) shows the inner structure of the prototype. This prototype is relatively large (424 �� 204 �� 178 [mm]) and a ballscrew at the axis of the mover has been introduced.
Experiment (video)
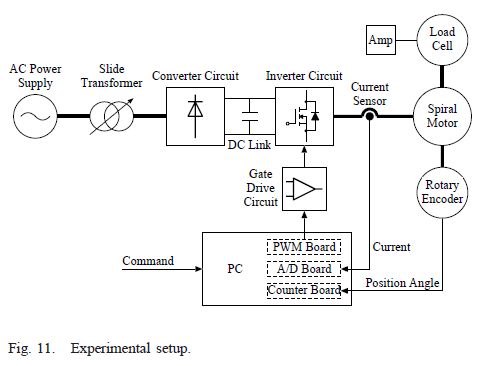
Fig. 11 shows the experimental setup for the developed prototype. An originally developed three-phase inverter is used to drive the prototype. The result of the driving test is shown in the following movie.
Application to robotics
Introduction
Rehabilitation robots are expected to contribute to future aging society. Safety issue is great concern for such robots.
Appropriate compliance is required for their joints. However, combination of servomotors and high gears, such as harmonic gears, is widely used in robotic applications. Considering that electric motor has high-velocity low-torque characteristic, the output of the motor is reduced by high-ratio gears. However, loss of torque and output power occurs during their transmission by the gears. The joint of robots becomes nonbackdrivable due to the high-ratio gears. The nonbackdrivability causes lack of adaptability and safety. Various joint mechanisms and controls that recover the backdrivability were reported in the past works [1]-[10]. The direct-drive system, firstly reported in [1] avoids friction loss and realizes good controllability, but the mass and volume of the joint becomes too big.
Torque sensorless control for a direct-drive manipulator based on disturbance observer was proposed in [2]. Another sensorless force control for a manipulator with geared actuators was reported in [3]. Moreover, an accelerometer improves performance of the disturbance observer [5]. The twin-drive system reported in [6] cancels the static friction of two geared motors each other
by using a differential gear system. The static friction does not appear in the total output of the joint system. Some actuators put elastic mechanism between the output and gears [7]-[10]. The elasticity improves stability and safety
but decreases controllability in high frequency domain. A two stage actuator system [8] overcomes this drawback but the system becomes complicated.
From the viewpoint of controllability, the direct-drive systems are suitable for robotic applications
because they are almost free from backlash and friction and easy to realize precise, high-speed, and safe motion.
However, conventional direct-drive systems including linear motors are relatively big for such applications.
Reference
H. Asada and T. Kanade, ��Design of direct-drive mechanical arms,��
ASME J. of Vibration, Stress, and Reliability in Design, vol. 105, no. 3,
pp. 312-316, 1983.
T. Murakami, F. Yu, and K. Ohnishi, ��Torque sensorless control in
multidegree-of-freedom manipulator,�� IEEE Trans. Industrial Electronics,
vol. 40, no. 2, pp. 259-265, 1993.
S. Katsura, Y. Matsumoto, and K. Ohnishi, ��Analysis and experimental
validation of force bandwidth for force control,�� IEEE Trans. Industrial
Electronics, vol. 53, no. 3, pp. 922-928, 2006.
S. Katsura, Y. Matsumoto, and K. Ohnishi, ��Modeling of force sensing
and validation of disturbance observer for force control,�� IEEE Trans.
Industrial Electronics, vol. 54, no. 1, pp. 530-538, 2007.
S. Katsura, K. Irie, and K. Ohishi, ��Wideband force control by positionacceleration
integrated disturbance observer,�� IEEE Trans. Industrial
Electronics, vol. 55, no. 4, pp. 1699-1706, 2008.
N. Hayashida, T. Yakoh, T. Murakami, and K. Ohnishi, ��A sensorless
force control in twin drive systems,�� in Proc. IEEE IECON, pp. 2231-
2236, 2000.
G. Pratt and M. Williamson, ��Series elastic actuators,�� in Proc. IEEE
IROS, pp 399-406, 1995.
M. Zinn, O. Khatib, B. Roth, J. K. Salisbury, ��Playing it safe,�� IEEE
Robotics and Automation Magazine, vol. 11, no. 2, pp. 12-21, 2004.
A. Bicchi and G. Tonietti, ��Fast and ��soft-arm�� tactics,�� IEEE Robotics
and Automation Magazine, vol. 11, no. 2, pp. 22-33, 2004.
A. Bicchi, M. Bavaro, G. Boccadamo, D. De Carli, R. Filippini, G.
Grioli, M. Piccigallo, G. Tonietti, R. Schiavi, and S. Sen, ��Physical
human-robot interaction: dependability, safety, and performance,�� in
Proc. IEEE AMC, pp. 9-14, 2008.
Development of the Second prototype
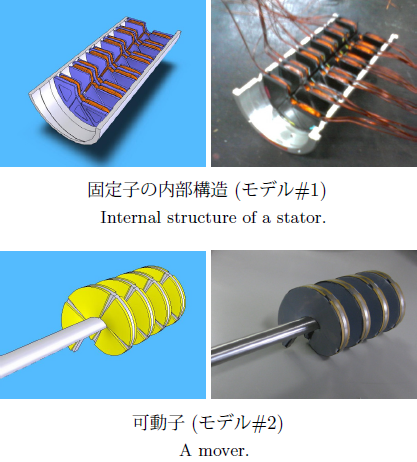
For robotic applications a small size prototype has been developed. This model is the second prototype of the spiral motor. This prototype does not utilize a ballscrew mechanism. Therefore, a proper gap control (magnetic levitation control) is needed to achieve full direct-drive system. The spiral structures of the first prototype were approximately realized by combining almost flat units. However, The spiral structures of the second prototype are fully helical shape.
Position control (1cm stroke, 5Hz)
Position control (full stroke)
Position control (short stroke)
Zero force control
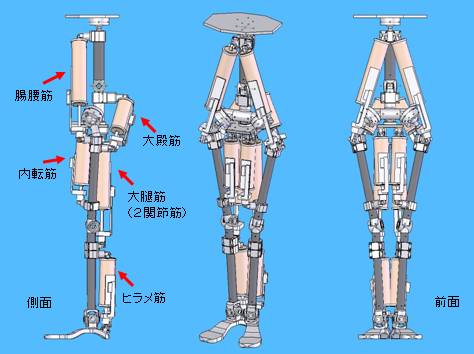
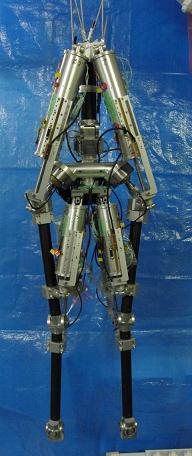
Development of the Third prototype
A direct-drive robot has good characteristics from a viewpoint
of force control. However, it was not applicable for
legged robots because of the heavy weight of the direct-drive
actuator. Our proposed actuators enable a direct-drive bipedal
robot. The structure of the robot becomes a musculoskeleton
because the spiral motor is supposed to be a kind of linear
actuators. Also the musculoskeletal structure is supposed to
bring control easiness. The spiral motor connects two links
over the joint(s) where the motor acts as a muscle. The spiral
motor can generate both pushing and pulling force while a
muscle of mammals generates pulling force only. Therefore,
one spiral motor is enough to drive one joint while mammals
have antagonistic pairs of muscles for one joint.
The third prototype is developed in order to act as a muscle for
legged robots
Position control (1cm stroke, 1Hz)
Position control (3cm stroke, 0.5Hz)
Arm actuation
Other applications
The proposed linear type motor is suitable for applications that require large thrust, compact and lightweight actuators.
The movies below show a basic electric power steering test, using the first prototype of the spiral motor, of an electric vehicle EV-1 developed by Dr. Hiroshi Fujimoto��s laboratory.
Due to the very complicated spiral shape, the initial capital of the spiral motor is relatively high. Therefore, future research will be directed towards reducing the cost.
Acknowledgment
This work is supported by Japan Society for the Promotion of Science. Grant-in-Aid for Scientific Research (KAKENHI), Grant-in-Aid for Young Scientists.
Reference
Spiral Linear Motor, JP.Patent No. 3712073 (WO2004/042902), 2006.3.3
Spiral Linear Motor, U.S.Patent 7176590B2, 2007.2.17
Ahmad Zaki bin Hj Shukor and Yasutaka Fujimoto,
"Planar Task Space Control of a Biarticular Manipulator Driven by Spiral Motors",
Int. Journal of Advanced Robotic Systems, vol. 9, 2012.10 (DOI:10.5772/51742)
Issam A. Smadi, Hiroko Omori, and Yasutaka Fujimoto,
"Development, Analysis and Experimental Realization of a Direct-Drive Helical Motor",
IEEE Trans. on Industrial Electronics, vol. 59, no. 5, pp. 2208-2216, 2012.5
Koichiro Suzuki, Yasutaka Fujimoto, "Modeling, Analysis and Experiments of an IPM Spiral Motor", Journal of the Robotics Society of Japan, vol. 28, no. 7, pp. 897-904, 2010.9
Yasutaka Fujimoto, Tsutomu Kominami, and Hiroshi Hamada, "Development and Analysis of a High Thrust Force Direct-Drive Linear Actuator", IEEE Trans. on Industrial Electronics, vol. 56, no. 5, pp. 1383-1392, 2009.5
Tsutomu Kominami and Yasutaka Fujimoto, "Studies on Thrust Characteristic of High-Thrust Spiral Motor", IEEJ Trans. on Industry Applications, vol. 129-D, no. 2, pp. 130-135, 2009.2
Tsutomu Kominami and Yasutaka Fujimoto, "Studies on Thrust Characteristic of High-Thrust Spiral Motor", IEEJ Trans. on Industry Applications, vol. 128-D, no. 5, 2008.5
Hyuk-jin Kwon, Yasutaka Fujimoto, "Thrust Characteristic of High-Thrust Spiral Motor Using FEM Analysis", IEEJ Trans. on Industry Applications, vol. 127-D, no. 6, pp. 653-662, 2007.6
Takahiro Mikami and Yasutaka Fujimoto,
"Design of a High-thrust Density Spiral Motor using Finite Element Analysis",
Proc. IEEE Industrial Electronics Society Annual Conference (IECON),
Montreal, 2012.10
Ahmad Zaki Shukor and Yasutaka Fujimoto,
"Force Control of Musculoskeletal Manipulator",
Proc. IEEE International Workshop on Advanced Motion Control (AMC),
Paper ID. 74, Sarajevo, 2012.3
Yasutaka Fujimoto, Tsubasa Suenaga, Yuuki Wakayama, Kengo Sawai, and Ahmad Zaki Shukor,
"Force Control of a Spiral Motor and Its Application to Musculoskeletal Biped Robot",
Proc. IEEE International Workshop on Advanced Motion Control (AMC),
Paper ID. 115, Sarajevo, 2012.3
Ahmad Zaki Shukor, Issam Abed Smadi, and Yasutaka Fujimoto,
"Development of a Biarticular Manipulator using Spiral Motors",
Proc. IEEE Industrial Electronics Society Annual Conference (IECON),
pp. 92-97, Melbourne, 2011.11
Tsubasa Suenaga and Yasutaka Fujimoto,
"Parameter Identification and Passive Direct Drive Control with
Magnetic Levitation for IPM-type Spiral Motor",
Proc. IEEE Industrial Electronics Society Annual Conference (IECON),
pp. 2147-2151, Melbourne, 2011.11
Ahmad Zaki Shukor, Yasutaka Fujimoto,
"Workspace Control of Biarticular Manipulator",
Proc. IEEE International Conference on Mechatronics (ICM),
ID-007137, Istanbul, 2011.4
Yasutaka Fujimoto, Issam A. Smadi, and Yuki Wakayama,
"Development of Musculoskeletal Biped Robot Driven by Direct-Drive Actuators",
Proc. IEEE International Conference on Mechatronics (ICM),
ID-007447, Istanbul, 2011.4
Issam A. Smadi, Hiroko Omori, and Yasutaka Fujimoto, "On Direct-drive Motion of a Spiral Motor", Proc. IEEE Industrial Electronics Society Annual Conference (IECON),
pp. 921-926, Glendale, 2010.11
Yasutaka Fujimoto, Issam A. Smadi, Hiroko Omori, and Yuuki Wakayama, "High Thrust Force Direct-Drive Linear Actuator and Its Application to Musculoskeletal Robots", Proc. International Symposium on Application of Biomechanical Control Systems to Precision Engineering (ISAB), pp. 217-222, 2010.7
Yasutaka Fujimoto, Issam A. Smadi, Hiroko Omori, Koichiro Suzuki, and Hiroshi Hamada, "Modeling and Control of a High-thrust Direct-drive Spiral Motor", Proc. IEEJ International Power Electronics Conference (IPEC), 24F1-4, pp. 2222-2229, 2010.6
Yasutaka Fujimoto, Yuuki Wakayama, Hiroko Omori, and Issam A. Smadi, "On a High-Backdrivable Direct-drive Actuator for Musculoskeletal Bipedal Robots", Proc. IEEE International Workshop on Advanced Motion Control, NF-003891, pp. 389-395, 2010.3
Issam A. Smadi, Hiroko Omori, and Yasutaka Fujimoto, "On Independent Position/Gap Control of a Spiral Motor", Proc. IEEE International Workshop on Advanced Motion Control, NF-001899, pp. 478-483, 2010.3
Yasutaka Fujimoto, Tsutomu Kominami, and Hiroshi Hamada, "Development of a Spirally-Shaped Linear Actuator", Proc. IEEE Industry Applications Society Annual Meeting (IAS), IAS15p6, 2008.10
Yasutaka Fujimoto and Tsutomu Kominami, "Development of a High Thrust Linear Actuator with High Backdrivability", Proc. IEEE International Workshop on Advanced Motion Control, pp. 360-364, 2008.3
Tsutomu Kominami, Yasutaka Fujimoto, "Inverter with Reduced Switching-Device Count for Independent AC Motor Control", Proc. IEEE Industrial Electronics Society Annual Conference (IECON), pp. 1559-1564, 2007.11
Tsutomu Kominami, Yasutaka Fujimoto, "A Novel Nine-Switch Inverter for Independent Control of Two Three-phase Loads", Proc. IEEE Industry Applications Society Annual Conference (IAS), pp. 2346-2350, 2007.9
Hyuk-jin Kwon and Yasutaka Fujimoto, "Thrust Characteristic of Spiral Motor Using FEM Analysis and Compensation for Thrust Fluctuation", IEEE International Workshop on Advanced Motion Control (AMC), vol. 2, pp. 535-540, 2006.3
Tsutomu Kominami and Yasutaka Fujimoto, "Magnetic Levitation Control and Spiral-Linear Transformation System for Spiral Motor", IEEE International Workshop on Advanced Motion Control (AMC), vol. 2, pp. 529-534, 2006.3
Hyuk-jin Kwon and Yasutaka Fujimoto, "On A Magnet Arrangement For Spiral Motor", Proc. IEEJ International Power Electronics Conference (IPEC), pp. 424-430, 2005.4
Hyuk-jin Kwon and Yasutaka Fujimoto, "FEM Analysis of High Thrust Spiral Motor", Proc. IEEE International Workshop on Advanced Motion Control (AMC), pp. 635-640, 2004.3
Tsutomu Kominami and Yasutaka Fujimoto, "Dynamic Model and Control of Six-Phase Spiral Motor", Proc. IEEE International Workshop on Advanced Motion Control (AMC), pp. 629-634, 2004.3